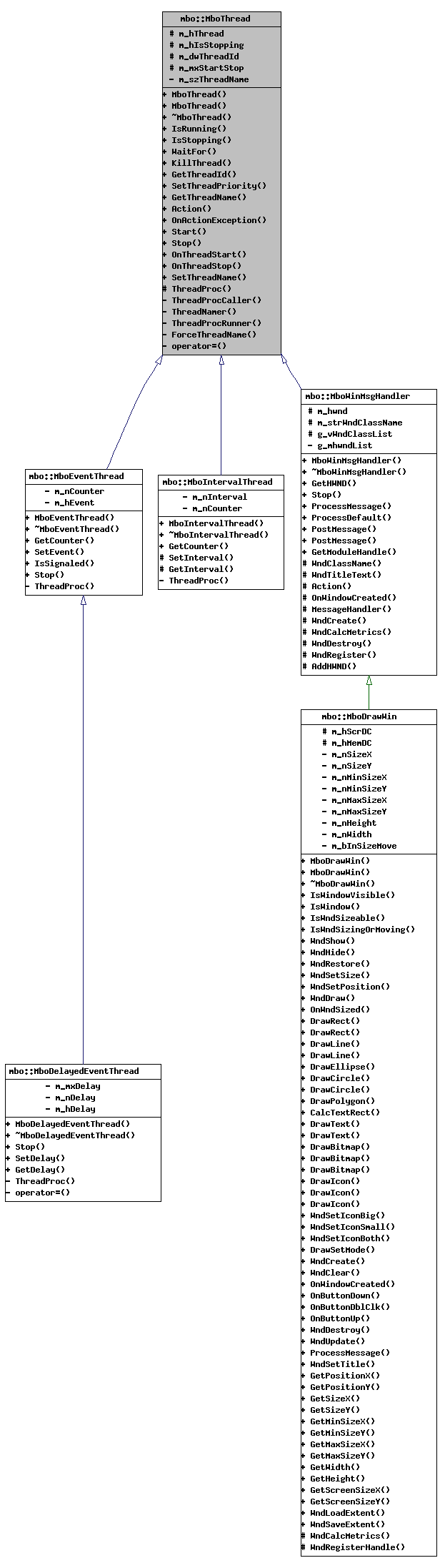
#include <MboThread.h>
Public Types | |
| enum | EThreadPriority { PRIORITY_IDLE = THREAD_PRIORITY_IDLE, PRIORITY_LOWEST = THREAD_PRIORITY_LOWEST, PRIORITY_LOW = THREAD_PRIORITY_ABOVE_NORMAL, PRIORITY_NORMAL = THREAD_PRIORITY_NORMAL, PRIORITY_HIGH = THREAD_PRIORITY_ABOVE_NORMAL, PRIORITY_HIGHEST = THREAD_PRIORITY_HIGHEST, PRIORITY_CRITICAL = THREAD_PRIORITY_TIME_CRITICAL } |
Public Member Functions | |
| MboThread () | |
| MboThread (const char *szThreadName) | |
| virtual | ~MboThread () |
| bool | IsRunning () const |
| bool | IsStopping () const |
| bool | WaitFor (DWORD nMilliseconds=INFINITE) const |
| bool | KillThread (DWORD nMilliseconds=0, DWORD dwExitCode=-1) |
| DWORD | GetThreadId () const |
| void | SetThreadPriority (EThreadPriority ePriority) |
| const char * | GetThreadName () |
| virtual void | Action ()=0 |
| virtual void | OnActionException () |
| virtual void | Start () |
| virtual void | Stop () |
| virtual void | OnThreadStart () |
| virtual void | OnThreadStop () |
Static Public Member Functions | |
| static void | SetThreadName (const char *szThreadName, DWORD dwThreadID=-1) |
Protected Member Functions | |
| virtual void | ThreadProc () |
Protected Attributes | |
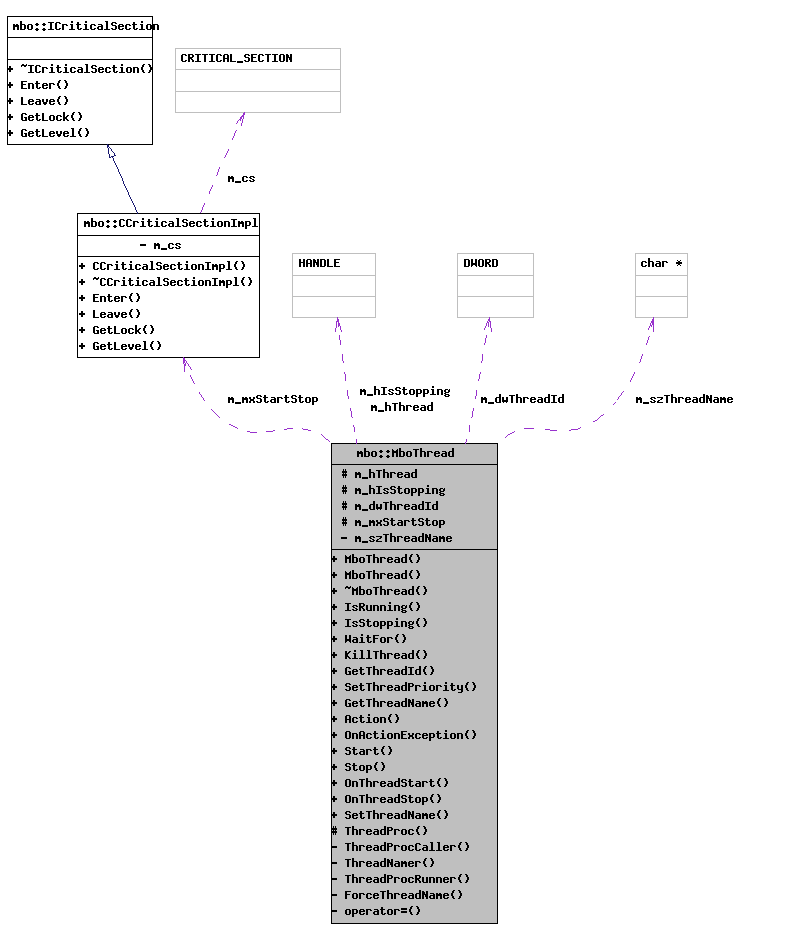
| HANDLE | m_hThread |
| HANDLE | m_hIsStopping |
| DWORD | m_dwThreadId |
| CCriticalSectionImpl | m_mxStartStop |
Friends | |
| DWORD WINAPI | MboThreadProc (LPVOID lpParameter) |
You simply have to write down your action as an implementation of abstract method Action() your class derived from MboThread. This Action method must exit when property IsStopping() is set true. When the destructor is called the thread will be notified to terminate by property mentioned above. The destructor does not exit before the thread has terminated.
Additionally you can override OnThreadStart() and OnThreadStop() callbacks that allow to execute some code from within the started/stopping thread. When OnThreadStop() is called within destructor the overrided method will be ignored and instead the NO OPERATION callback gets executed. This results from C++ language design but can be solved by overriding the destructor with a custom one that calls Stop() And WaitFor() itself.
The threads can be assigned a name. This can be used for debugging purpose starting from MSVC.NET (unofficially since MSVC.6-SP2, but there only the beginning of the name is visible). If you not explicitly specify a name then the class name will be taken as thread name.
When extending the class it is important to guard all property access code by entering the mutex m_mxStartStop.
This class is distributed under the following license GNU Lesser General Public License, version 2.1.
Definition at line 105 of file MboThread.h.
Thread priority classes. These directly map to the native priority classes.
| PRIORITY_IDLE | |
| PRIORITY_LOWEST | |
| PRIORITY_LOW | |
| PRIORITY_NORMAL | |
| PRIORITY_HIGH | |
| PRIORITY_HIGHEST | |
| PRIORITY_CRITICAL |
Definition at line 180 of file MboThread.h.
00181 { 00182 PRIORITY_IDLE = THREAD_PRIORITY_IDLE, 00183 PRIORITY_LOWEST = THREAD_PRIORITY_LOWEST, 00184 PRIORITY_LOW = THREAD_PRIORITY_ABOVE_NORMAL, 00185 PRIORITY_NORMAL = THREAD_PRIORITY_NORMAL, 00186 PRIORITY_HIGH = THREAD_PRIORITY_ABOVE_NORMAL, 00187 PRIORITY_HIGHEST = THREAD_PRIORITY_HIGHEST, 00188 PRIORITY_CRITICAL = THREAD_PRIORITY_TIME_CRITICAL 00189 };
| mbo::MboThread::MboThread | ( | ) |
default constructor
| mbo::MboThread::MboThread | ( | const char * | szThreadName | ) | [explicit] |
constructor
| szThreadName | The name of the thread. The new class instance will copy the value and free its copy automatically upon destruction. You may want to use NULL to use the class name of as the thread name. If you do so the name is computed in thread startup - this only works if this is not done in constructor. If done so the name you will see is the name of that parent class whose constructor started the thread. |
| virtual mbo::MboThread::~MboThread | ( | ) | [virtual] |
| bool mbo::MboThread::IsRunning | ( | ) | const |
Check if a thread is running
| bool mbo::MboThread::IsStopping | ( | ) | const |
Check if a thread is told to stop
| bool mbo::MboThread::WaitFor | ( | DWORD | nMilliseconds = INFINITE |
) | const |
| bool mbo::MboThread::KillThread | ( | DWORD | nMilliseconds = 0, |
|
| DWORD | dwExitCode = -1 | |||
| ) |
Stop the thread, wait a given time for the thread to terminate and kill it afterwards if necessary.
| nMilliseconds | Time in milliseconds to wait for the thread to terminate normally. | |
| dwExitCode | Exitcode for the thread if killed. |
| DWORD mbo::MboThread::GetThreadId | ( | ) | const |
Retrieve Id of thread
This value is NULL if no thread is running
| void mbo::MboThread::SetThreadPriority | ( | EThreadPriority | ePriority | ) |
Set the threads priority class.
| ePriority | new priority for the thread. |
| const char* mbo::MboThread::GetThreadName | ( | ) |
Get thread name.
When the name was set NULL in constructor then this function triggers the name generation. However this has the same affects when called from inside a constructor.
| virtual void mbo::MboThread::Action | ( | ) | [pure virtual] |
Action method to be implemented by derived classes.
This Method is called once after Start() is successfull and may contain an infinite loop. But the method has to check whether or not it must exit (IsStopping())
Implemented in mbo::MboWinMsgHandler.
| virtual void mbo::MboThread::OnActionException | ( | ) | [virtual] |
Callback executed when the action method cathes an exception.
This default implementation logs the errors via windows' debug output.
| virtual void mbo::MboThread::Start | ( | ) | [virtual] |
Start the thread.
to check whether or not the thread was really started implement an OnThreadStart() handler in the derived class.
| virtual void mbo::MboThread::Stop | ( | ) | [virtual] |
Stop the thread.
This only sets the variable m_bIsStoping
Reimplemented in mbo::MboEventThread, mbo::MboDelayedEventThread, and mbo::MboWinMsgHandler.
| virtual void mbo::MboThread::OnThreadStart | ( | ) | [virtual] |
Method called emidiatley after thread has started and before Action() is called.
| virtual void mbo::MboThread::OnThreadStop | ( | ) | [virtual] |
Method that is called when action is left e.g. thread is stoping.
| static void mbo::MboThread::SetThreadName | ( | const char * | szThreadName, | |
| DWORD | dwThreadID = -1 | |||
| ) | [static] |
Set the thread name for the debugging interface.
| szThreadName | The new name of the thread | |
| dwThreadID | The thread id or -1 to select current thread. |
| virtual void mbo::MboThread::ThreadProc | ( | ) | [protected, virtual] |
Call OnThreadStart()/Action()/OnThreadStop()
| DWORD WINAPI MboThreadProc | ( | LPVOID | lpParameter | ) | [friend] |
Grant global function MboThreadProc access to all members
HANDLE mbo::MboThread::m_hThread [protected] |
HANDLE to thread or NULL (guarded by m_mxStartStop)
Definition at line 262 of file MboThread.h.
HANDLE mbo::MboThread::m_hIsStopping [protected] |
Stop flag (Event)
Definition at line 263 of file MboThread.h.
DWORD mbo::MboThread::m_dwThreadId [protected] |
Thread Id or 0 (guarded by m_mxStartStop)
Definition at line 264 of file MboThread.h.
CCriticalSectionImpl mbo::MboThread::m_mxStartStop [protected] |
Mutex used for start/stop access
Definition at line 265 of file MboThread.h.
| Hosted on code.google.com | © Marcus Börger | Generated on Fri Jan 18 21:21:13 2008 for MBO-lib by  1.5.4 1.5.4 |